Bildgebung und Navigation
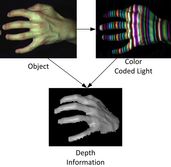
COMPASS
Das Projekt COMPASS erarbeitet neue Assistenzfunktionen für die minimalinvasive Chirurgie. Dabei sollen 3D Videodaten zu Tiefenbildkarten umgewandelt werden und diese Information räumlich verortet werden. Dazu muss eine echtzeitfähige 3D Videoverarbeitungskette und eine echtzeitfähige Lokalisierung im Raum gewährleistet sein. Im Rahmen des Projektes sollen außerdem Assistenzfunktionen, wie das Erkennen und Klassifizieren von Peritonealkarzinose im Bauchraum mittels maschinellem Lernen entstehen...
SoloAssist kognitiv
Mittels eines Eyetrackingsystems soll ein kognitives Kameranachführungssystem entwickelt werden, das dem Operateur ermöglicht, ohne Assistenz zu agieren und automatisch den Blicken des Operateurs folgt...

TeKaMIC
Dieses Projekt ist eine Fortsetzung des Projekts SoloAssist und zielt darauf ab, die Kameraführung mit dem entwickelten Roboterarm zu automatisieren. Um zielorientiert zu arbeiten, schließt sich MITI mit der AKTORmed GmbH, dem Caritas Krankenhaus St. Josef in Regensburg, der GEFASOFT Automatisierung und Software GmbH, der Fakultät für Maschinenbau der Fachhochschule Deggendorf, dem Labor für Digitaltechnik und Automation der Fachhochschule Regensburg und der Sensorik-Bayern GmbH zusammen, um ein Sensorik-Cluster zusammenzustellen...
Innovative Therapieverfahren
MIEO-Port
Das Ziel dieses Projekts ist die Erarbeitung von grundlegenden Erkenntnisse im Bereich der Gewebe-Kunststoff-Interaktion sowie die biologische als auch klinische Evaluation. Diese Grundlagenbetrachtungen sollen zukünftig als Basis für die Entwicklung von neuartigen, minimal-invasiven Einwegprodukten...



ISSA
Der Innovative Sichere und Sterile Sigmoid-Ansatz (ISSA) wurde entwickelt, um die Instrumente und die Technik für einen transsigmodialen Zugang in der minimal-invasiven Chirurgie zur Unterstützung endoskopischer Eingriffe zu etablieren. Insbesondere für die "Natural Orifice Transluminal Endoscopic Surgery" (NOTES)...
Mechatronische Supportsysteme und Instrumente
PLAFOKON
Ziel des Projektes ist die Weiterentwicklung der minimalinvasiven Operationsplattform "Single-Port Overtube" (SPOT) und deren nahtlose Einbettung in die klinischen Abläufe. Dies soll durch eine ganzheitliche Betrachtung des chirurgischen Behandlungspfads von der Zuweisung bis zur Entlassung erreicht werden...

Forschungsgruppe Single-Port
Minimal-invasive endoskopische Operationsmethoden führen potentiell zu einer erheblichen Reduktion von Traumata und somit zu einer schnelleren Erholungszeit der Patienten. Das volle Potential dieser neuen Methodik ...

SoloAssist
In Zusammenarbeit mit den Firmen Delta Engineering und MicroEpsilon wird ein Assistenzsystem zur Führung der Kamera bei minimal-invasiven Eingriffen entwickelt. Der Roboterarm "SoloAssist". ...
Modellbasierte Chirurgie, Telematik und Kommunikation
CONNECT
Ziel des Projektes ist die Entwicklung eines ubiquitär einsetzbaren, transluminalen, größenskalierbaren Anastomosierungssystems (Akronym: CONNECT), welches die mikroinvasive Realisierung von Anastomosen in weiten Teilen des Gastrointestinaltrakts ermöglicht und hierbei die Nachteile derzeitiger Anastomosierungsmethoden vermeidet...
ARTEKMED
Im Rahmen von ARTEKMED wird ein Telepräsenzsystem für die medizinische Konsultation mittels Augmented Reality für den Einsatz am Unfallort und in der Klinik entwickelt. Das System erlaubt es alle verfügbaren, aber nicht vor Ort befindlichen Experten zur Konsultation virtuell an den Ort des Geschehens zu bringen, um die behandelnden Ärzte bei Diagnose und Behandlung zu unterstützen...
PROTECT
In der COVID-19-Krise lastet große Verantwortung auf dem Gesundheitssystem. Medizinisches Personal ist bei der Behandlung möglicher Infizierter erhöhten Risiken ausgesetzt, die es zu mildern gilt: Zum persönlichen Schutz, zur Unterbrechung von Infektionsketten und zur Vermeidung von Kreuzinfektionen.
Im Projekt ProteCT soll eine robotergestützte Telediagnostik medizinischem Personal ermöglichen, Patientinnen und Patienten aus sicherer Entfernung zu untersuchen. ...
5G-VINNI
Das EU-Projekt 5G-VINNI (5G Verticals Innovation Infrastructure) hat zum Ziel, die Einführung der 5. Generation Mobiler Kommunikation (5G) in Europa zu beschleunigen, indem es Pilotanwendungsfälle etabliert, welche die aktuell noch bestehenden Eintrittshindernisse zum Zukunftsmarkt 5G für die vertikalen Industrien senkt und diese bei der Weiterentwicklung der 5G Infrastruktur unterstützt (https://www.5g-vinni.eu/concept-approach/)...

IVAP 2025
In dem von der Bayerischen Forschungsstiftung gefördertem Forschungsprojekt „Interventionsarbeitsplatz 2025“ wird in Partnerschaft mit Trumpf Medical (TRUMPF Medizin Systeme GmbH + Co. KG) das Ziel verfolgt, den Operationssaal mit allen Funktionalitäten auszurüsten, die die Durchführung modernster und künftiger Eingriffsarten ermöglichen und gleichzeitig ...


FI-STAR (Future Internet Social and Technological Alignment Research)
FI-STAR ist ein Projekt im Rahmen der Future-Internet Initiative der Europäischen Union. Ziel ist eine frühe Nutzung und Untersuchung der Future Internet (FI)-Technologie, basierend auf den Vorarbeiten und ...

Simulation und Training
APROV-RB
Operativ-technisches Training ist für junge Mediziner in der chirurgischen Ausbildung besonders wichtig. Neben „learning by doing“ am Menschen - unter fachkundiger Anleitung - gehören vitale Tiermodelle zu den wirklich realitätsnahen Trainingsszenarios auf diesem Gebiet. Bei letzteren sind es vor allem ethische Bedenken und der hohe organisatorische Aufwand für die Bereitstellung der ...

ELITE
Der ELITE-Trainer (Endoscopic-Laparoscopic Interdisciplinary Training Entity) ist ein neues Ex-vivo-Modell, mit dem konventionelle laparoskopische und endoskopische Fertigkeiten trainiert und hybride Interventionen durchgeführt werden können. Diese Ausbildungseinheit ist auf die Anforderungen der Laparoskopie und Endoskopie ausgerichtet und ...
