COMPASS
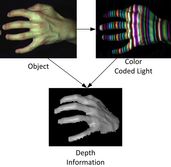
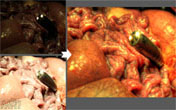
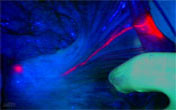
The COMPASS project develops new assistance functions for minimally invasive surgery. 3D video data will be converted into depth image maps and this information will be spatially located. For this purpose, a real-time 3D video processing chain and real-time spatial localization must be guaranteed. The project also aims to develop assistance functions such as the recognition and classification of peritoneal carcinomatosis in the abdominal cavity by means of machine learning...
SoloAssist cognitive
By means of an eye tracking system a cognitive camera tracking system shall be developed, which enables the surgeon to act without assistance and automatically follows the surgeon's gaze...

TeKaMIC
This project is a follow-up of the project SoloAssist and targets to automate the camera guidance with the developed robot arm. To work goal-orientated, MITI affiliates with the AKTORmed GmbH, the Caritas Krankenhaus St. Josef in Regensburg, the GEFASOFT Automatisierung und Software GmbH, the Faculty of Mechanical Engineering of the University of Applied Sciences Deggendorf, the Laboratory for Digital Technology and Automation of the University of Applied Sciences Regensburg and the Sensorik-Bayern GmbH in order to compose a sensory cluster. ...
MIEO-Port
The aim of this project is to develop basic knowledge in the field of tissue-plastic interaction and to perform biological and clinical evaluation. In the future, these basic considerations will serve as a basis for the development of novel, minimally invasive disposable products...



PLAFOKON
The aim of the project is the further development of the minimally invasive surgical platform "Single-Port Overtube" (SPOT) and its seamless integration into clinical procedures. This is to be achieved by a holistic view of the surgical treatment path from allocation to discharge...
Research Group Single-Port

Minimally-invasive endoscopic operating methods potentially induce an enormous reduction of trauma and therewith a faster recovery time for the patient. However, the full potential of this new ...

SoloAssist
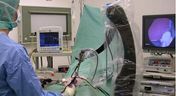
In cooperation with the companies Delta Engineering and MicroEpsilon an assisting system to guide the camera during minimally invasive surgeries is developed. The robot arm “SoloAssist” ...
CONNECT
The aim of the project is the development of an ubiquitously applicable, transluminal, size-scalable anastomosis system (acronym: CONNECT), which allows the microinvasive realization of anastomoses in large parts of the gastrointestinal tract and avoids the disadvantages of current anastomosis methods...
ARTEKMED
Within the framework of ARTEKMED, a telepresence system for medical consultation using augmented reality is being developed for use at the accident site and in the clinic. The system allows all available but not on-site experts to be brought virtually to the scene of the accident for consultation in order to support the attending physicians in diagnosis and treatment...
PROTECT
In the COVID 19 crisis, the health care system bears a great deal of responsibility. Medical personnel are exposed to increased risks in the treatment of potentially infected patients, which must be mitigated: for personal protection, to interrupt infection chains and to avoid cross-infections.
In the ProteCT project, robotic telediagnostics will enable medical personnel to examine patients from a safe distance. ...
5G-VINNI
The EU project 5G-VINNI (5G Verticals Innovation Infrastructure) aims to accelerate the introduction of the 5th Generation Mobile Communication (5G) in Europe by establishing pilot use cases that lower the current barriers to entry into the future 5G market for vertical industries and support them in further developing the 5G infrastructure (https://www.5g-vinni.eu/concept-approach/)...



FI-STAR (Future Internet Social and Technological Alignment Research)
FI-STAR will establish early trials in the Health care domain building on Future Internet (FI) technology leveraging on the outcomes of ...
OR.NET

Goal of the approximately 15M euro project, funded by the German Federal Ministry of Education and Research (BMBF) is the development of "plug-and-play" standards and driver models to connect ...
APROV-RB
Surgical-technical training is particularly important for young physicians in surgical education. Besides "learning by doing" on humans - under expert guidance - vital animal models are among the really realistic training scenarios in this field. With the latter, ethical concerns and the high organisational effort required to provide the ...

ELITE
The ELITE (Endoscopic-Laparoscopic Interdisciplinary Training Entity) trainer is a new ex vivo model designed to train conventional laparoscopic and endoscopic skills and to perform hybrid interventions. This training entity is dedicated to the requirements of laparoscopy and endoscopy and ...
